


1. 通常的机器人输送链跟踪,均为直线输送链跟踪,例如下图
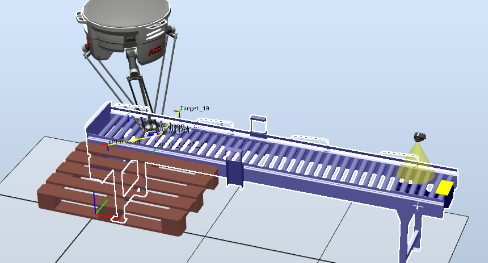
2. 有些情况,输送链为圆形,例如文首的图例。ABB机器人也支持圆形输送链跟踪。与直线输送链跟踪相比,配置主要区别为直线跟踪的单位是“米”,圆形跟踪的单位是“弧度”。以下参数为圆形输送链相关参数解释。
参数名 | 举例 |
CountsPerMeter | 40000 counts per radian At 6 m radius, one count = 0.15 mm |
minimum distance 最小跟踪距离 | -100 milliradians At 6 m radius, = -600 mm |
Conveyor base frame 输送链基坐标 | base frame x = 8.0 m base frame y = 0.0 m base frame z = 0.0 m |
The x-axis is rotated 2.44 rad from the world X (XIRB) | base frame q1 = 0.3420 base frame q2 = 0.0000 base frame q3 = 0.0000 base frame q4 = 0.9397 |
SyncSeparation | 0.005 rad At 6 m radius = 30 mm |
QueueTrkDist | 0.017 rad At 6 m radius = 100 mm |
maximum distance | 420 milliradians At 6 m radius = 2520 mm |
StartWinWidth | 0.017 rad At 6 m radius = 100 mm |
3. 以上参数设置同Linear跟踪,主要在配置-I/O的DeviceNet Command下

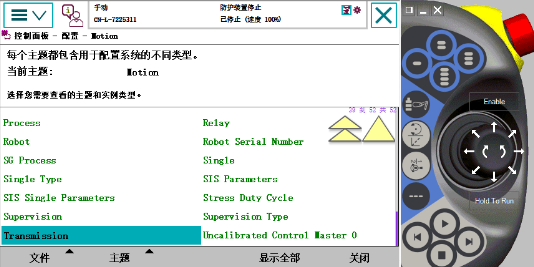
4. 对于圆形跟踪,需要将配置-主题Motion下的Single Type的Mechanics改为ext_rot
将配置-主题Motion下的Transmission的Rotating Move改为Yes

最后,记得关注微信公众号:机器人
