


(1)步距角和静态步距误差
步进电机的步距角是决定开环伺服系统脉冲当量的重要参数,数控机床中常见的反应式步进电机的步距角一般为0.5°~3°;一般情况下,步距角越小,加工精度越高。
静态步距误差指理论的步距角和实际的步距角之差,以分表示,一般在10’之内。步距误差主要由步进电机齿距制造误差,定子和转子间气隙不均匀以及各相电磁转矩不均匀等因素造成的。步距误差直接影响工作的加工精度以及步进电机的动态特性。
(2)启动频率:
空载时,步进电机由静止突然启动,并能不丢步地进入正常运行所允许的最高频率,称为启动频率或突跳频率。若启动时步进电机定子绕组通电状态变化频率大于启动频率,步进电机就不能正常启动。启动频率与负载惯量有关,一般说随着负载惯量的增长而下降。
(3)连续运行的最高工作频率
步进电机连续运行时,它所能接受的,即保证不丢步运行的极限频率, 称为最高工作频率。最高工作频率是决定定子绕组通电状态最高变化频率的参数,它决定了步进电机的最高转速。其值远大于启动频率。最高工作频率随负载的性质和大小而异,与驱动电源也有很大关系。
(4)加减速特性。
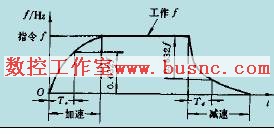 步进电机的加减速特性是描述步进电机由静止到工作频率和由工作频率到静止的加减速过程中,定子绕组通电状态的变化频率与时间的关系。当要求步进电机启动到大于突跳频率的工作频率时,变化速度必须逐渐上升;同样,当要求步进电机从最高工作频率或高于突跳频率的工作频率停止时,变化速度必须逐渐下降。逐渐上升或下降的加速时间、减速时间不能过小,否则会出现失步或超步。一般用加速时间常数Ta和减速时间常数Td来描述步进电机的升速和降速特性
步进电机的加减速特性是描述步进电机由静止到工作频率和由工作频率到静止的加减速过程中,定子绕组通电状态的变化频率与时间的关系。当要求步进电机启动到大于突跳频率的工作频率时,变化速度必须逐渐上升;同样,当要求步进电机从最高工作频率或高于突跳频率的工作频率停止时,变化速度必须逐渐下降。逐渐上升或下降的加速时间、减速时间不能过小,否则会出现失步或超步。一般用加速时间常数Ta和减速时间常数Td来描述步进电机的升速和降速特性
(5)矩频特性与动态转矩
矩频特性是描述步进电机连续稳定运行时,输出转矩Md与连续运行频率f之间的关系。矩频特性曲线上每一个频率所对应的转矩称为动态转矩。动态转矩随连续运行频率的上升而下降下。
上述步进电机的主要特性,除步距角和静态步距误外,其余均与驱动电源有很大关系。驱动电源性能好,步进电机的特性可得到明显改善。
